什么是工业机器人?
“机器人”是一个关键词,含义广泛,波动很大。各种对象相关联,例如人形机器或人们进入并操纵的大型机器。
机器人最初是在 20 世纪初卡雷尔·查佩克 (Karel Chapek) 的戏剧中构思出来的,然后被描绘在许多作品中,并以该名称命名的产品已经发布。
在这种背景下,今天的机器人被认为是多样化的,但工业机器人已经被用于许多行业来支持我们的生活。
除了汽车和汽车零部件行业以及机械和金属行业,工业机器人现在越来越多地应用于各个行业,包括半导体制造和物流。
如果我们从角色的角度来定义工业机器人,我们可以说它们是有助于提高工业生产力的机器,因为它们主要从事重度工作、繁重的劳动和需要精确重复的工作,而不是人。
工业机器人的历史
历史
在美国,第一台商用工业机器人诞生于 1960 年代初。
引进到 1960 年代后半期处于高速成长期的日本,从 70 年代开始在国内生产和商业化机器人的举措。
此后,由于1973年和1979年的两次石油冲击,价格上涨,降低生产成本的势头增强,这将渗透到整个行业。
1980年,机器人开始迅速普及,据说是机器人开始流行的一年。
早期使用机器人的目的是为了取代制造业中的苛刻作业,但机器人还具有连续作业、重复作业准确的优势,因此在今天被更广泛地用于提高工业生产率。应用领域不仅在制造过程中而且在包括运输和物流在内的各个领域都在扩展。
我们的参与
最初,焊接工作是使用埋弧焊机和专用机器实现自动化的。针对通用自动焊接设备的需求,我们制造了焊接机器人。70 年代后期,我们推出了第一台焊接机器人,1980 年,我们开始销售通用弧焊机器人。
随着机器人的日益普及,我们尽早开发了100%手头示教操作和设备间协同控制(同步运动功能)。今天,我们在用于弧焊应用的机器人领域拥有世界领先的份额※。
我们还一直在开发可用于各种应用且具有良好操作性的机器人,以应对客户的各种挑战。
它的应用并不局限于电弧焊,而是正在扩展到包括材料处理和配合在内的各个领域。
※富士经济调查(2020 财年结果)

通用弧焊机器人(THOR-K)
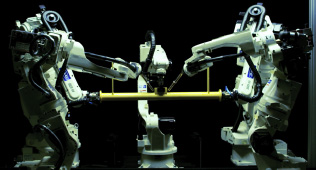
协调控制(同步运动功能)
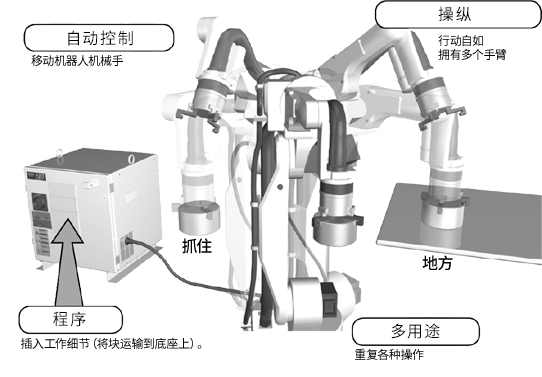
机器人的配置
工业机器人具有类似于人体的机制,因为它们承载的是工作而不是人。
例如,当一个人移动他/她的手时,他/她通过他/她的神经从他/她的大脑传输命令并移动他/她的手臂肌肉来移动他/她的手臂。
工业机器人有一个充当手臂及其肌肉的机构,以及一个充当大脑的控制器。
机械部分
机械手是一个机械单元。机械手备有各种便携重量,可根据作业分别使用。
另外,机械手有多个关节(称为关节),关节由连杆连接。
控制单元
机器人控制器对应控制器。
根据存储的程序进行运算处理,并据此向伺服电机发出指令,控制机械手。
机器人控制器连接有作为与人交流接口的示教器,以及装有启动和停止按钮、紧急开关等的操作箱。
机械手通过控制电缆连接到机器人控制器,该控制电缆传送电力以移动机械手和来自机器人控制器的信号。
机械手和机器人控制器使记忆运动的手臂自由地按照指令运动,但它们也根据应用连接外围设备,以执行特定的工作。
根据工作的不同,有各种机器人安装装置统称为末端执行器(工具),这些工具安装在机械手尖端称为机械接口的安装端口上。
此外,通过组合必要的外围设备,它成为了所需应用程序的机器人。
※例如,在弧焊中,焊枪作为末端执行器,焊接电源和送料装置作为外围设备与机器人结合使用。
此外,还可以采用传感器作为机器人识别周围环境的识别单元。它充当人的眼睛(视觉)和皮肤(触觉)。
通过传感器获取并处理物体的信息,利用这些信息,可以根据物体的状态控制机器人的运动。
机器人机构
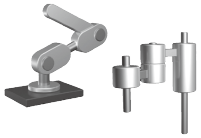
工业机器人的机械手按机构分类时,大致分为四种。
| 学期 |
定义 |
| 笛卡尔机器人 |
机械臂机械结构以直角坐标形式为主的机器人 |
| 圆柱形机器人 |
机械臂机械结构主要采用柱坐标形式的机器人 |
| 极地机器人 |
机械臂机械结构以极坐标形式为主的机器人 |
| 关节型机器人 |
手臂机械结构主要由三个或三个以上旋转关节组成的机器人 |
1笛卡尔机器人(Cartesian Robot)
手臂由平移关节驱动,其优点是刚性高,精度高。另一方面,存在工具的操作范围相对于地面接触区域较窄的缺点。
2圆柱形机器人(Cylindrical Robot)
第一臂由旋转接头驱动。与直角坐标机器人相比,更容易确保动作范围。
3极地机器人(Polar Robot)
第一和第二臂由旋转接头驱动。这种方法的优点是与圆柱坐标机器人相比更容易确保运动范围。但是,位置的计算变得更加复杂。
4铰接式机器人(Articulated Robot)
所有手臂都由旋转关节驱动的机器人相对于地平面具有非常大的运动范围。
虽然操作的复杂性是劣势,但电子元件的精密化使得复杂的操作能够高速处理,成为工业机器人的主流。
我们的专长之一是这种多关节机器人。
顺便说一句,大多数关节机器人类型的工业机器人都有六个旋转轴。这是因为可以通过给定六个自由度来任意确定位置和姿势。
在某些情况下,根据工件的形状,很难保持 6 轴位置。(例如,当需要环绕时)
为了应对这种情况,我们在 7 轴机器人阵容中增加了一个额外的轴,并增加了姿态容差。
使用机器人的好处
2质量稳定
稳定的重复操作减少了手动可能发生的质量变化。
3确保劳动力
该系统弥补了少子老龄化带来的承载不足,能够承担长期的高负荷工作。
4改善工作环境
机器人可以替代繁重的工作或危险的工作,使人们可以将精力投入到更专业的工作中。
教学(教学)
为了让机器人完成工作,需要编程来教导和记忆机器人的动作。该任务称为教学。
教学方法主要有两种:使用示教器进行教学和直接使用机器人进行教学以学习如何操作(直接教学)。
使用示教器进行教学具有不同的优势:机器人只需按下每个按钮即可移动,应用命令也触手可及,而直接教学则直观地将机器人带到目标位置。
我们的 Armega 机器人基于示教器。但是,用户可以针对操作环境提出最合适的解决方案。例如,示教器是一个内置WiTP和陀螺仪传感器的JoyPEN,可以无线连接,游戏感直观操作。
如今,还安装了一种减少教学所需劳动力的功能,例如通过输入参数自动创建图案程序。

示教器
机器人自动化
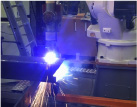
弧焊
这是我们机器人开发触发的一个应用。电弧是一种放电现象,以电弧为热源,在被接合物与电极之间产生电弧,利用热量熔化接合金属。
等离子切割
此应用程序将电弧能量集中在切割区域并将其熔化。广泛应用于需要切割金属的场合,如切割管材、钢板等。
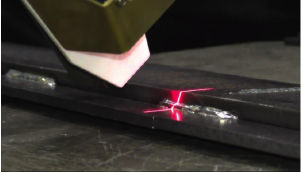
激光焊接/切割
来自激光束的能量被用作热源来熔化金属,然后将其连接或切割。当需要非常高速的构造或当您想要抑制由热源引起的物体变形时使用。
物料搬运设备
这是一个用于在工厂内运输原材料、半成品和成品的应用程序。
码垛和卸垛
这是一个将货箱整理和装载(码垛)到托盘上的应用程序,主要用于进出港运输过程,以及从托盘上卸载(码垛)货箱。
封胶
本申请将密封材料应用于工件,以确保构件之间的气密性和水密性。
安装零部件
该应用程序使用力传感器来检测微小力的施加方式,并使装配工作自动化。我们的机器人制造工厂使用自己的机器人来安装减速器。
喷涂
这是一种表面处理应用,通过将喷涂材料加热熔化并喷涂到工件上,在工件表面形成一层涂层。
机器人焊接的优势
机器人焊接的优点主要有①减轻繁重的工作,②实现统一的工作效果,③不休息地高速移动,提高生产率。
焊接利用电弧的热量(一种放电现象)熔化和连接金属。
由于使用电力,本产品使用不当会造成触电或熔化金属燃烧的危险。
此外,在焊接过程中会产生含有大量紫外线和烟尘的弧光,这些金属微粒是细小的金属颗粒。直接暴露在这些光下也会导致眼科和呼吸系统疾病。
因此,在进行焊接作业时,必须穿戴耐光面、防尘面罩、皮手套等防护用品,以及工作服、工作帽、工作鞋。
无论是寒冷的冬日还是炎热的夏日,这样的全身上下都很难坚持下去。
另外,当我们长期反复工作时,我们的人会精神不集中,有时身体状况有时会不太好。身体也可能反射性地或无意识地移动。
相比之下,机器人忠实地重复他们教过的动作。
此外,该机器人可进行高速焊接,因为它可以精确且非常快速地移动,并且可以在白天和晚上稳定地重复相同的操作,因此对于提高生产率非常有效。
近年来,我们已经能够进行与以前相比无法比拟的高质量制造,但由于要制造的工具结构的复杂性,也出现了手工操作困难的问题其重量的基础。这些机器人也适用于这种先进的焊接方法,因为它们容易举起,操作准确,即使很重也不会疲劳。
机器人焊接工作难度大
机器人焊接虽然有多种优点,但有时对人不利。
在人工焊接的情况下,我们不仅在焊接过程中,而且在焊接过程前后,都使用技巧来获得最佳的焊接效果。
通过检查焊接时金属的熔化情况,可以调整速度,调整焊枪位置,改变焊丝伸出长度。通过将耳朵倾斜到焊接声音,它可以用作调整质量和条件的指标。
焊接前,考虑到工件温差造成的熔化方式变化,可根据气候提前微调条件。另外,也可以事先留意材料差异(构件间的偏差)和根部间隙(构件间的间隙),考虑到这些也可以决定是进行焊接还是提前返工。
焊接后,您还可以查看焊缝并分析其外观。
另一方面,机器人忠实地按照教导的内容进行操作。因此,机器人很难进行人类的调整。
为了解决这个问题,机器人使用传感器获取信息,然后根据这些信息使工作适应实际环境。
通过使用该传感器,即使工件的排列发生偏移,也可以根据偏差跟踪焊接线(焊接点)进行焊接,并根据检测到的路径间隙改变条件。此外,使用机器人和相机传感器的珠子外观检测系统正变得比以往任何时候都更加稳定。
然而,教授机器人焊接的人对于稳定和高质量的机器人焊接来说是非常重要的一点,因为人决定在什么条件下焊接以及根据传感器获得的信息确定什么标准。
重要的是人和机器人,而不是人或机器人,利用各自的优势分工合作。

传感器
传感视图
使用机器人所需的资质
工业机器人是一种非常方便的机器,可以日夜反复运行。但是,使用不当可能会导致严重的事故。
为此,法律规定要求从业人员在从事工业机器人的教学或维修工作时,必须经过专门培训。
该专项教育在《安全卫生专项指导手册》中有课程,均规定了科学性和实践性的教育。
科普将获得工业机器人的基础知识和相关法律法规的知识以及各自的工作。
通过实用技术,学习机器人的操作方法,根据各业务进行工作。
不仅要遵守法律法规,还要确保所有员工的安全。
作为工业机器人的综合制造商,我们还准备了教育服务,例如满足特殊教育要求的机器人安全教育课程的定期研讨会,我们广泛支持客户引进工业机器人。

课程现场
| 类型 |
科目 |
时间 |
|
关节型机器人 |
2hours |
| 工业机器人示教等操作知识 |
4hours |
| 関係法令 |
1hours |
| 関節ロボット |
工业机器人的操作方法 |
1hours |
| 工业机器人的示教等工作方法 |
2hours |
使用周边治具设备的目的
外围治具装置用于保证工作质量,扩大机器人的应用范围。
定位器
该夹具主要用于焊接应用。在焊接作业中,焊接部位的姿态和角度对焊接效果和质量影响很大。
利用旋转机构(1轴变位机)和倾斜旋转机构(2轴变位机)始终保持焊接姿势恒定,从而实现稳定的焊接质量。
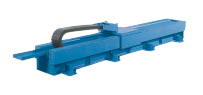
滑块
滑块是配备机械手的直线运动机构的外围设备,可以扩大机器人的工作范围。
主要用于被加工物体的尺寸大于机械手的操作范围或加工位置有多个且超出操作范围时。