主要特点
- 提高离线编程的操作性
- 搭载有从各种角度确认示教情况的多画面、透明化、测量功能、角度监控功能。
- 外部轴的示教更加方便
- 只要操作鼠标就可以自动将变位器、滑台等的外部轴位置调整到最适合焊接的位置。
- 自动生成传感器的作业程序
- 标准接触寻位传感器的作业程序可自动生成。大幅缩短离线示教时及现场的示教时间。
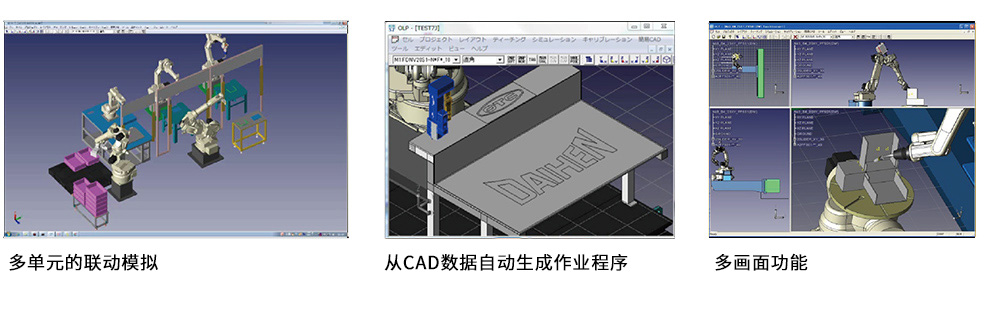
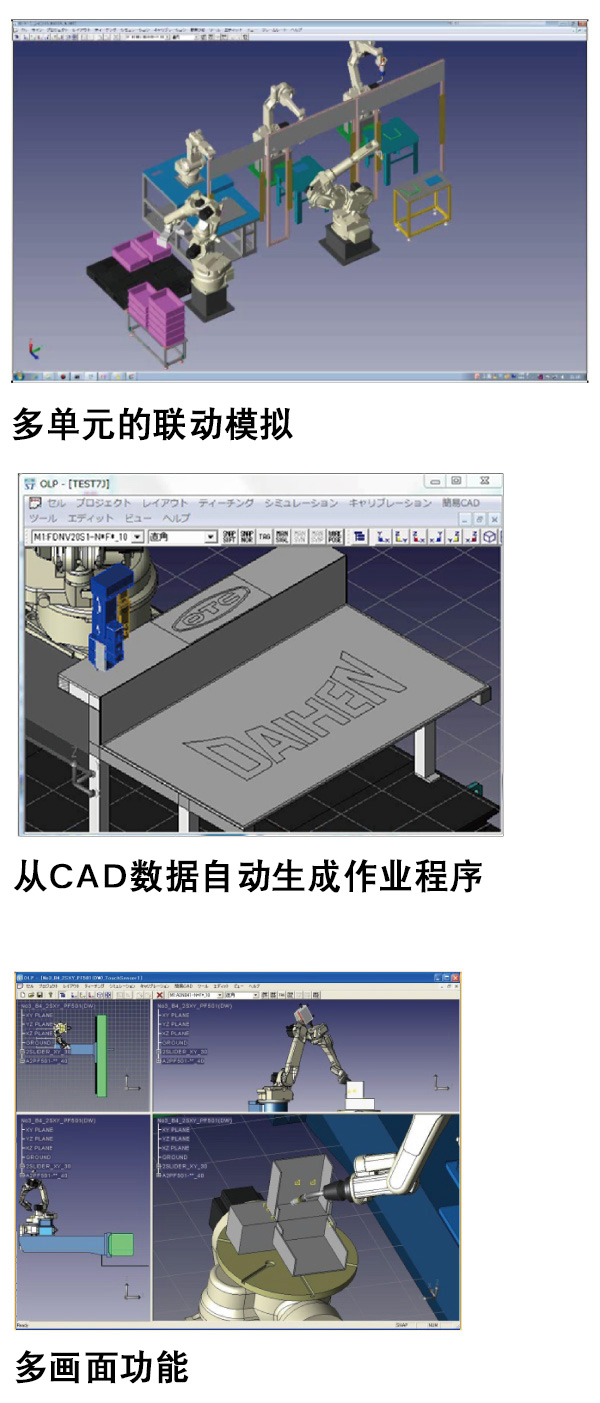
- 大幅减少生产线和单元系统的示教及模拟工作量
- 强化生产线布局的生成功能,并实现多台机器人的批量模拟。
能够通过I/O同步实现多台机器人的联动动作。
- 从CAD数据自动生成作业程序
- 从CAD数据自动生成切割用作业程序。
简化示教作业,扩大可适用的应用范围。
规格
功能一览
| 适用例 | 功能 | |
|---|---|---|
| 为机器人的导入研究提供支援 | 自动布局 |
|---|---|
| 确认机器人的可动作范围 | |
| 焊枪建模 | |
| 输出布局信息 | |
| 测量(距离测量) | |
| 离线示教 | 多画面 |
| 透明显示/线框显示/截面显示 | |
| 简易CAD(草图) | |
| 使用操纵杆手动运行 | |
| 点捕捉功能 | |
| 外部轴点捕捉功能(选项) | |
| 工件装卸(选项) | |
| 自动轨迹生成 | |
| 轨迹生成&显示(选项) | |
| 检测轨迹自动生成(选项) | |
| 动作模拟 | 再生运行 |
| 周期测量 | |
| 干渉检测 | |
| 异常接近检测 | |
| 轨迹显示功能 | |
| 工件搬运(选项) | |
| 同时模拟多个机器人控制装置 |
系统要件
- 参数
- 规格
- 基本软件
- Windows 7
- CPU
- Intel CoreTM i5 2.4GHz以上
- 内存
- 4GB以上
- 硬盘容量
- 需要800MB以上的可用空间
- 图形分辨率
- 1280 × 1024点以上
- USB端口
- USB1.1或USB2.0(需要连接密码锁)

