タブレットによる教示レスシステム
 撮って選ぶだけでロボットプログラムを自動生成し
撮って選ぶだけでロボットプログラムを自動生成し
ロボット教示の課題にこたえる

背景と課題
人手不足対策や生産性向上のために、新たにロボットを導入する際の特に重要な課題として、ロボットの教示に不慣れで、操作に時間がかかることが挙げられます。溶接用途であれば、最適な溶接姿勢が分からない、溶接狙い位置の調整が難しいといった課題があります。
ロボット操作の慣れには時間がかかることも多くあり、ロボットの本稼働が遅くなってしまいます。ダイヘンのタブレットによる教示レスシステムはその課題を解決します。
現場にロボットを導入
した際の課題
- ロボットの教示に不慣れで操作に時間がかかる
- 最適な溶接姿勢が分からない
- 溶接の狙い位置調整が難しい
タブレットによる教示レスシステムなら
対象物を撮影するだけで教示プログラムを自動生成
ダイヘンのタブレットによる教示システムは、ロボットを動かすことなくiPadアプリからARマーカと対象のワークを撮る・溶接個所を選ぶ・プログラムを送る だけで簡単に教示することができます。
そのため、少量多品種のワークにも最適です。



だけで簡単教示

課題
- ロボットの教示に不慣れで操作に時間がかかる
課題を解決する機能 1ロボットは動かさずカメラ撮影だけで簡単教示
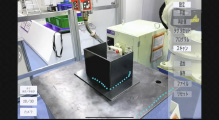
撮影データから溶接線を自動認識
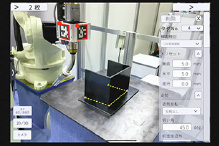
iPadアプリからARマーカと対象物を撮影
ワークをARマーカと同時に撮影することで、相対位置を取得。
ロボットがワークの位置を認識し、溶接個所の候補が表示されます。

複数画像の合成にも対応
溶接したい箇所が一度では撮影できない場合、複数回撮影を行い、合成し、溶接線情報を取得できます。
課題
- 最適な溶接姿勢が分からない
課題を解決する機能 2溶接姿勢は数値入力で自由に設定
溶接箇所・トーチ角度・溶接条件を手元で設定
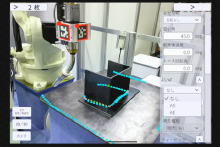
溶接狙い位置候補をタッチ
撮影すると、ロボットの狙い位置の候補が表示されます。
溶接する溶接開始点・経由点・溶接終了点を選択していきます。
課題
- 溶接の狙い位置調整が難しい
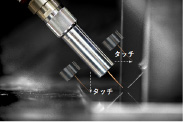
課題を解決する機能 3タッチセンサで狙い位置を自動調整
タッチセンサ機能で高精度位置補正
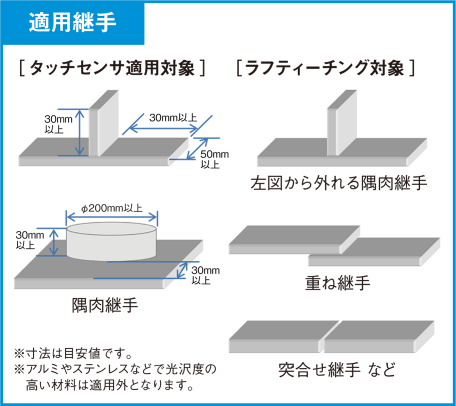
条件に合致する継手はタッチセンサで位置補正可能。
iPadで作成したティーチングデータをアーク溶接に必要となる高精度な位置データへと自動変換します。
タッチセンサの命令は自動で生成されますので、タッチセンサの命令を教示する必要はありません。
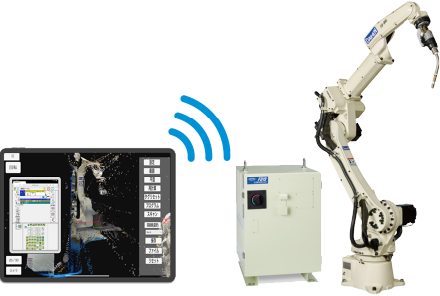
ボタン一つでコントローラにプログラムを送信
iPadからデータを転送
3D表示された溶接線と溶接姿勢を確認してプログラムを送信。
タブレットにティーチペンダントの画面を表示可能なため、転送されたプログラムを確認、編集することも可能です。
実演動画

チュートリアル
設定編

チュートリアル
操作編

ダウンロード資料

カタログ
