
極低スパッタ性能・高品質な溶接を実現する新モードを搭載
簡単セットアップ・メンテナンス性向上でさらに使いやすく
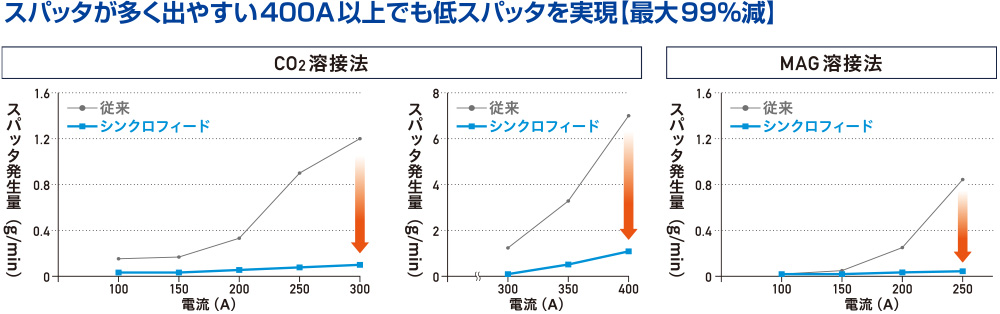
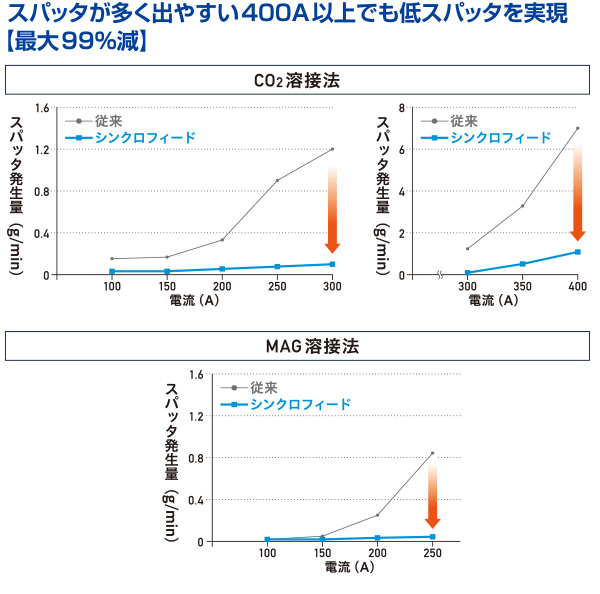
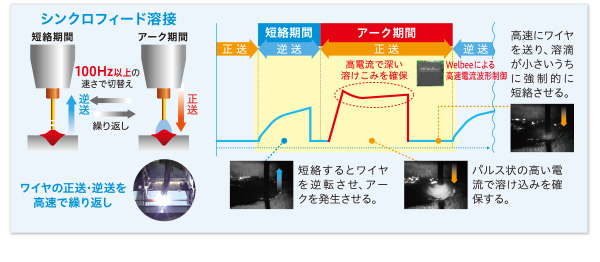
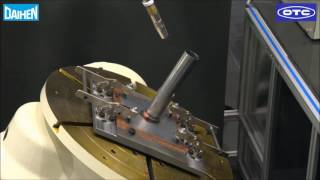
シンクロフィードがスパッタ問題を解決!
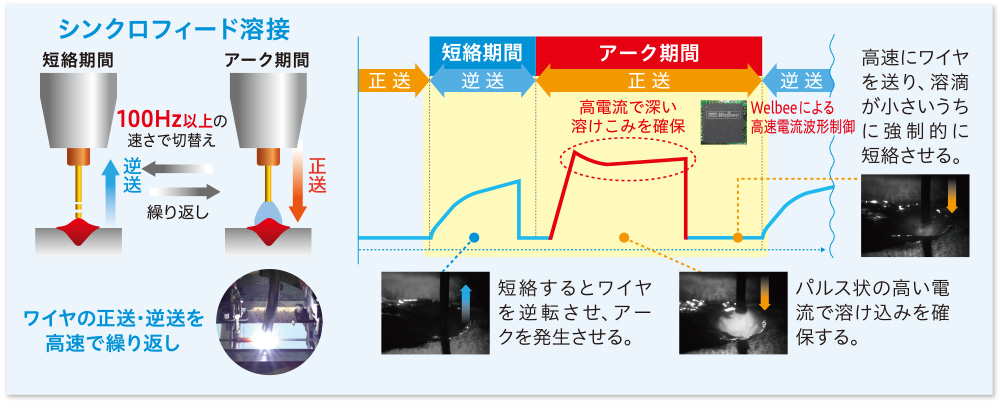
シンクロフィードの原理
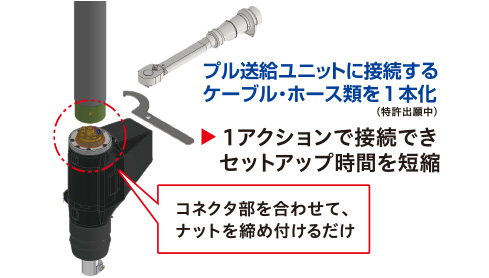
シンプルな構成で簡単接続

メンテナンス性向上


軟鋼、ステンレス、アルミなど、
様々な材質に対応
新モードを搭載し、
更なる高品質溶接を実現
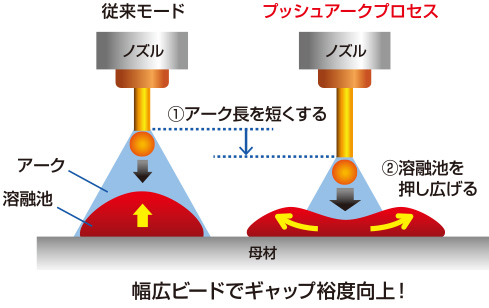
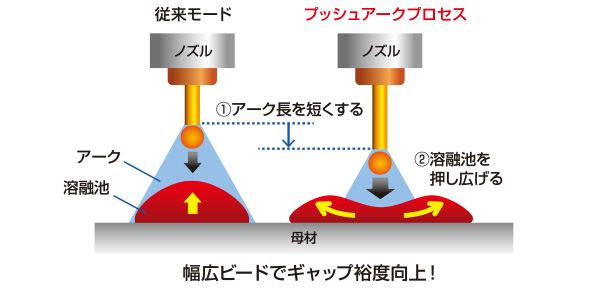
プッシュアークプロセス
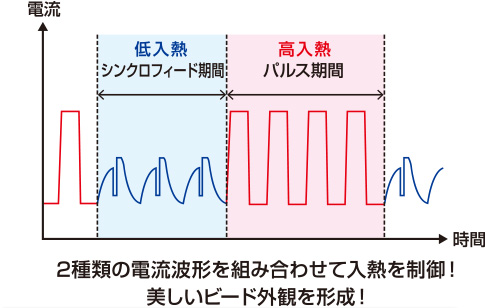
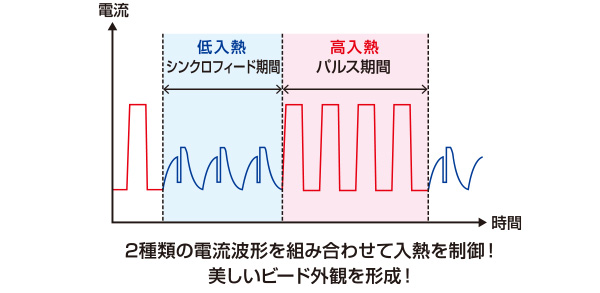
シンクロフィードパルス
業界・ワーク別の施工課題と解決提案
四輪
バンパー・クラッシュボックス
(アルミ)
(アルミ)
課題
板厚違い、溶け落ち
解決提案
シンクロフィードパルス

シンクロフィードとパルス溶接の比率調整で入熱管理が容易。
パイプフレーム
(アルミ)
(アルミ)
課題
ビード外観
解決提案
ステッチパルス溶接(ウロコビード形成)

ステッチパルス溶接による美しいウロコビードの形成。TIGに代わり、生産能率アップ。
サスペンション・ロアアーム
(亜鉛メッキ鋼板)
(亜鉛メッキ鋼板)
課題
ギャップ・ねらいズレ裕度、スパッタ、ブローホール、複数台溶接
解決提案
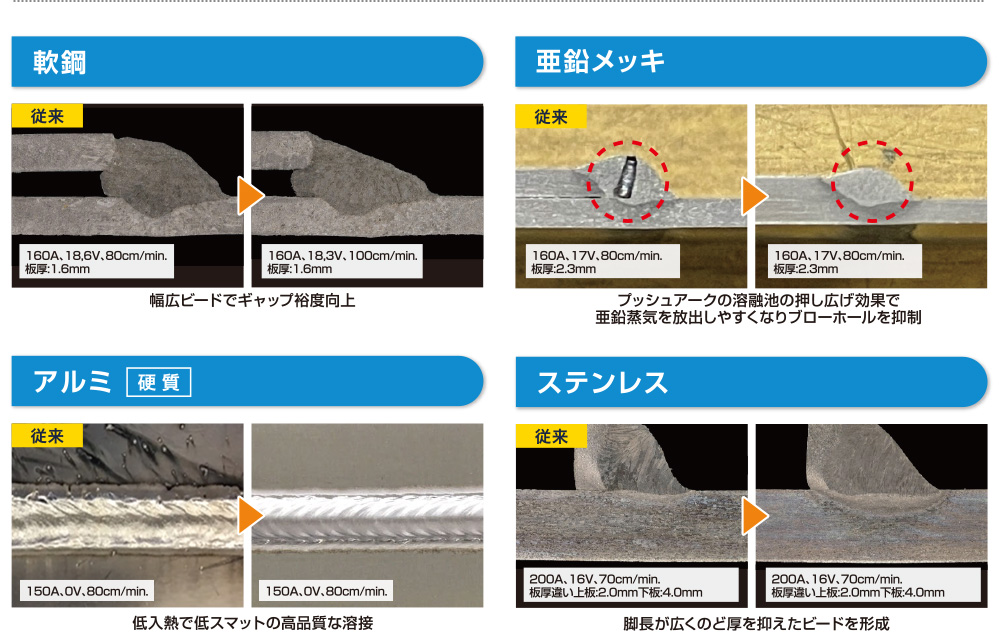
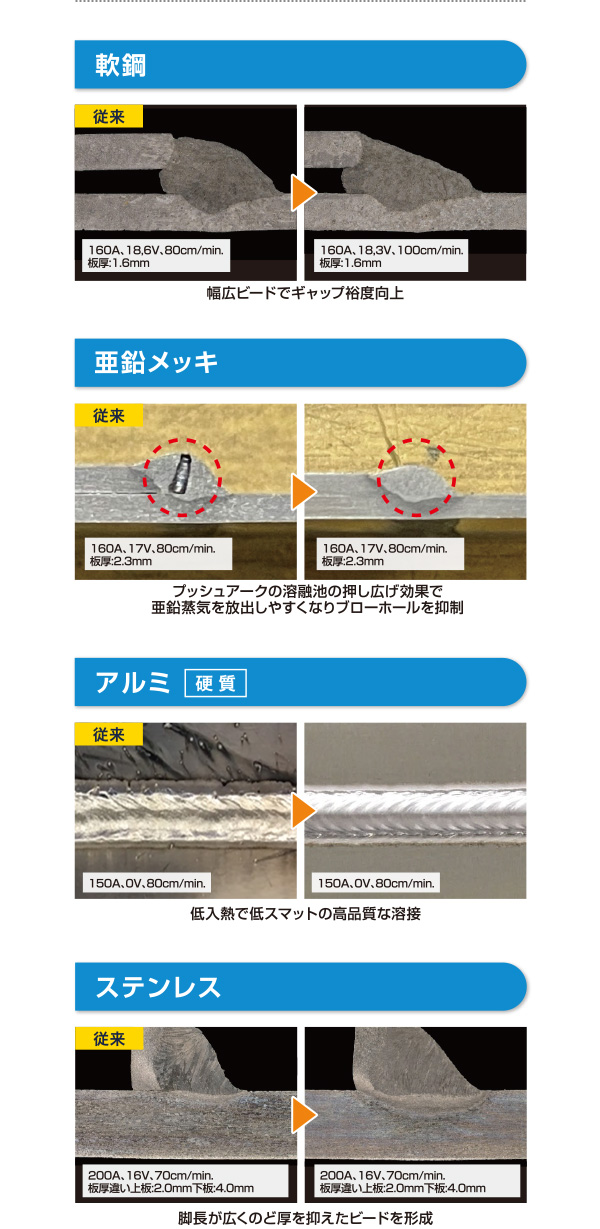
プッシュアーク(幅広ビード)

プッシュアークによって幅広ビード、低スパッタ、亜鉛蒸気排出が可能。予測制御によって複数台同時溶接でも低スパッタ性能を維持。
シートフレーム
(ハイテン)
(ハイテン)
課題
極薄板溶接(0.6mm)、ギャップ・狙いズレ裕度
解決提案
プッシュアーク(幅広ビード)

シンクロフィード溶接によって極薄板も溶け落ち無しで溶接可能。スパッタの付着や混入がNGのためシンクロフィードの極低スパッタ性能は最適。プッシュアークによる幅広ビードで裕度拡大。
バッテリーケース
(アルミ)
(アルミ)
課題
ギャップ裕度、熱歪み、溶け落ち
解決提案
プッシュアーク(幅広ビード)

プッシュアークによる幅広ビードでギャップ裕度拡大。低入熱の溶接が可能で、熱歪みや溶け落ちを抑制。
二輪・自転車
タンク
(鉄)
(鉄)
課題
ねらいズレ裕度
解決提案
プッシュアーク(幅広ビード)

シンクロフィード溶接による極低スパッタを実現。プッシュアークによる幅広ビードで裕度拡大。
マフラー・エギゾーストマニホールド
(ステンレス)
(ステンレス)
課題
ギャップ裕度、板厚違い
解決提案
プッシュアーク(幅広ビード)

プッシュアークによる幅広ビードで裕度拡大。高速溶接性能もアップ。
建機
キャビン
(鉄)
(鉄)
課題
中厚板溶接におけるスパッタの付着防止、溶け込み不足
解決提案
最大電流450Aの高電流溶接

高電流域での極低スパッタ溶接によりスパッタ取り工程の削減と深い溶け込みを両立。
その他
グレーチング、建築足場、はしご 等
各種業界でのスパッタ低減など溶接品質向上に貢献。
- 軟鋼
- ハイテン鋼
- ステンレス鋼
- 亜鉛めっき鋼板
- アルミ
重ね
隅肉
突合せ
MAG
-

 軟鋼t1.6mm重ね隅肉GAP0.5mmによる極低スパッタ溶接
軟鋼t1.6mm重ね隅肉GAP0.5mmによる極低スパッタ溶接
-
 軟鋼t1.6mm重ね隅肉GAP1.5mmによる極低スパッタ溶接
軟鋼t1.6mm重ね隅肉GAP1.5mmによる極低スパッタ溶接
CO2
-
 軟鋼t3.2mm重ね隅肉による極低スパッタ溶接
軟鋼t3.2mm重ね隅肉による極低スパッタ溶接
MAG
-
 軟鋼t1.6mm隅肉GAP0.5mmによる極低スパッタ溶接
軟鋼t1.6mm隅肉GAP0.5mmによる極低スパッタ溶接
-
 軟鋼t1.6mm隅肉GAP1.5mmによる極低スパッタ溶接
軟鋼t1.6mm隅肉GAP1.5mmによる極低スパッタ溶接
CO2
-
 軟鋼t2.0mm隅肉下進溶接による極低スパッタ溶接
軟鋼t2.0mm隅肉下進溶接による極低スパッタ溶接
CO2
-
 軟鋼極薄板t0.6mm突合せによる低入熱溶接
軟鋼極薄板t0.6mm突合せによる低入熱溶接






各種情報


Login
※標準仕様書のダウンロードにはユーザ登録が必要となります。
同業他社の方のご登録につきましては告知なくIDを削除させていただくことがあります。ご了承ください。
製品を選ぶ
-
低可搬(3~8kg)
 マニピュレータ仕様
マニピュレータ仕様
マニピュレータ仕様低可搬(3~8kg)
- 1
- 2
-
型式 NB6 NV8 NB6L NV8L 軸数 6 6 6 6 最大許容可搬質量 6kg 8kg 6kg 8kg 位置繰返し精度 ±0.08mm ±0.08mm (注1) 士0.08mm (注1) 士0.08mm (注1) 駆動容量 3132W 3016W 4832W 5000W 動
作
範
囲腕 J1(旋回) ±170°(±50°) ±170° (±50°) (注2) 士170°(士50°) (注2) 土170°(壁:士50°)(注2) J2(下腕) –155°〜+90° –155°〜+90° -155°〜+100°(注3) -155°〜+100° J3(上腕) –170°〜+245° –170°〜+190° -170°〜+190° -170°〜+260° 手
首J4(回転) ±155° ±180° ±土155°(土170°) (注4) 士180° J5(振り) –45°〜+225° –50°〜+230° -45°〜+225°(注5) -50°〜+230° J6(ひねり) ±205° ±360° 士205°(士360°) (注4、5) 士360° -
型式 NH5 NS3 NG3 軸数 ◀ 6 5 最大許容可搬質量 5kg 3kg 3kg 位置繰返し精度 ±0.05mm (注1) ±0.08mm (注1) ±0.08mm (注1) 駆動容量 1440W 390W 1400W 動
作
範
囲腕 J1(旋回) ±170° ±135° (±45°) (注2) ±170° J2(下腕) –125°〜+90° –160°〜+65° ±50° J3(上腕) –140°〜+245° –130°〜+125° ±150° 手
首J4(回転) ±190° ±180° ±210° J5(振り) –30°〜+210° –40°〜+220° ±130° J6(ひねり) ±360° ±360°
-
中可搬(15~25kg)
 マニピュレータ仕様
マニピュレータ仕様
マニピュレータ仕様中可搬(15~25kg)
-

型式 NV25 NV25L NB26 軸数 6 6 6 最大許容可搬質量 25kg 25kg 26kg 位置繰返し精度 士0.07mm (注1) 士0.07mm (注1) 士0.04mm (注1) 駆動容量 5600W 11,500W 5800W 動
作
範
囲腕 J1(旋回) 土170°(壁:土50°) (注2) 土180° 土170°(壁:土50°) (注2) J2(下腕) -155°〜+100° -155°〜+90° -155°〜+100° J3(上腕) -170°〜+260° -180°〜+250° -170°〜+250° 手
首J4(回転) 土180° 土180° 土170°(壁:土1555°) (注2) J5(振り) -50°〜+230° -50°〜+230° -45°〜+225° J6(ひねり) 土360° 土360° (注3) 土360° (壁:土205°) (注2)
-
-
7軸ロボット
マニピュレータ仕様
マニピュレータ仕様7軸ロボット
-
構造 垂直多関節型 垂直多関節型 垂直多関節型 垂直多関節型 垂直多関節型 軸数 7 7 7 7 7 最大許容可搬質量 6kg 6kg 8kg 8kg 20kg 位置繰返し精度 ±0.05mm (注1) ±0.06mm (注1) ±0.05mm (注1) ±0.06mm (注1) ±0.06mm (注1) 駆動方法 ACサーボモータ ACサーボモータ ACサーボモータ ACサーボモータ ACサーボモータ 駆動容量 4132W 5832W 4016W 6000W 6600W 位置フィードバック 絶対値エンコーダ 絶対値エンコーダ 絶対値エンコーダ 絶対値エンコーダ 絶対値エンコーダ 動
作
範
囲腕 J1(旋回1) ±170° ±170° ±170° ±170° ±170° J2(前後) –145°〜+70° –145°〜+75° –145°〜+70° –145°〜+75° –145°〜+75° J7(旋回2) ±90° ±90° ±90° ±90° ±90° J3(上下) –170°〜+142.6° –170°〜+154° –170°〜+149° –170°〜+160° –170°〜+160° 手
首J4(回転) ±155° ±155° ±180° ±180° ±180° J5(振り) –45°〜+225° (注2) –45°〜+225° (注2) –50°〜+230° (注2) –50°〜+230° (注2) –50°〜+230° (注2) J6(ひねり) ±205° (注2) ±205° (注2) ±360° (注2) ±360° (注2) ±360° (注2)
-


動画
シンクロフィード・エボリューション