Main features
- Offline 3D cell layout, programming and simulation package.
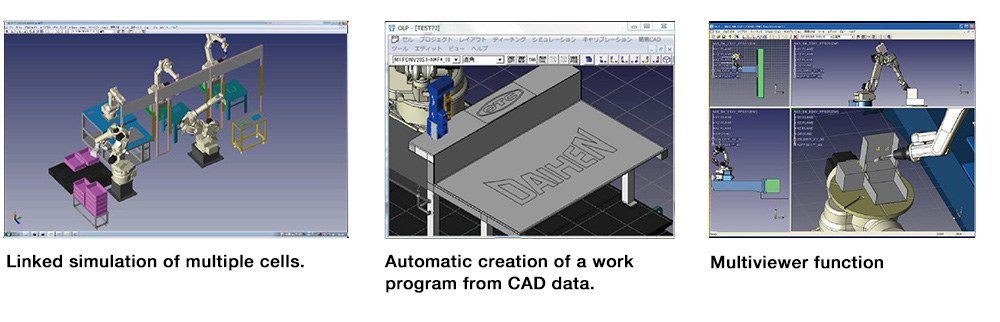
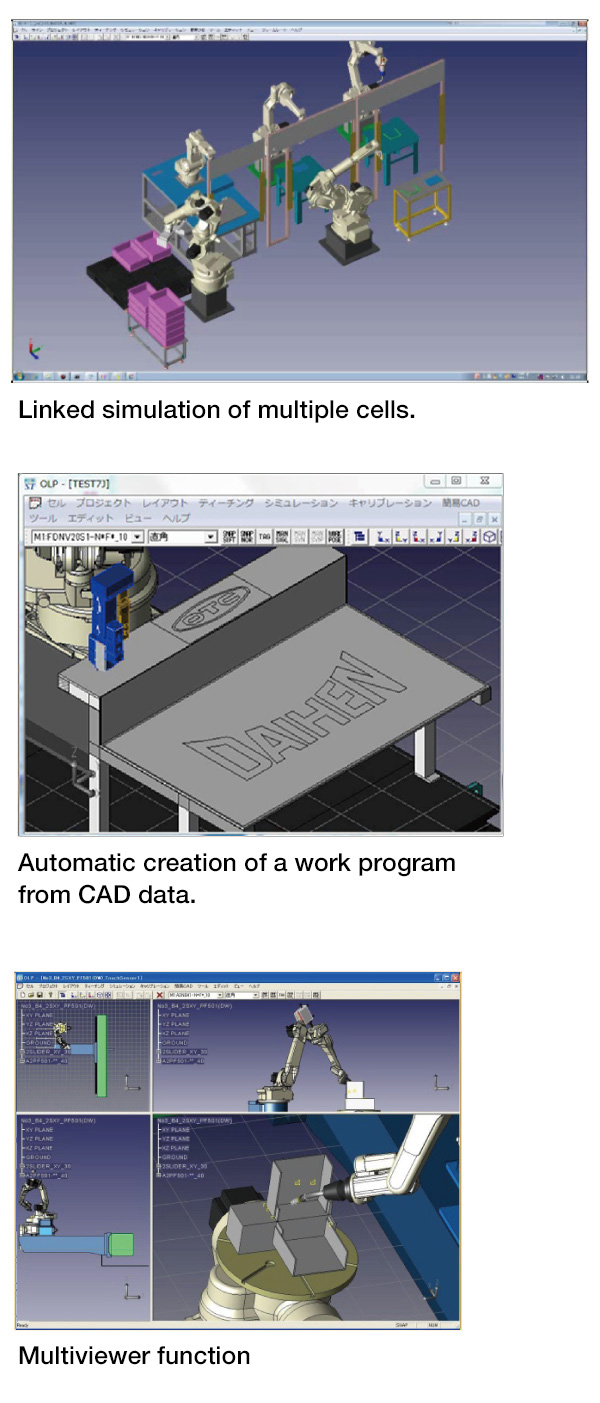
- To ensure that teaching can be performed from multiple points-of-view, a multi-viewer, object transparency setting, measurement function and angle monitor are available.
- Simplified external axis teaching
- Automatic adjustment of the external axis of the positioner and slider for optimal welding, all at the click of a mouse.
- Sensor program can be automatically created.
- Offline and shop floor teaching time can be greatly shortened through the automatic creation of touch sensor work programs.
- Reduce the man-hours required for teaching / simulation of your production line / robot cell.
- Grouped simulation of multiple robots are available with the line layout creation function.
I/O synchronization allows linked operation of multiple robots.
- Automatic creation of work programs from your CAD data.
- Automatic creation of processing path programs from your CAD data.
Teaching has been simplified for the entire range of possible robot applications.
Specifications
Function list
| Application examples | Functions | |
|---|---|---|
| Robot introduction examination support | Automatic layout |
|---|---|
| Robot operation work envelope confirmation | |
| Torch modeling | |
| Layout data output | |
| Measurement (distance measurement) | |
| Offline teaching | Multiviewer |
| Transparent / Wire frame / Cross-sectional display modes | |
| Easy CAD (sketcher) | |
| Manual operation using an operation handle | |
| Snap operation | |
| External axis snap operation (option) | |
| Workpiece mounting (option) | |
| Automatic path creation | |
| Path creation & display (option) | |
| Automatic sensing path creation (option) | |
| Operation simulation | Reproduction running |
| Cycle time measurement | |
| Interference detection | |
| Near miss check | |
| Track display | |
| Workpiece transport (option) | |
| Simultaneous simulation of multiple robot controllers |
System requirements
- Elements
- Specifications
- Basic software
- Windows 7
- CPU
- Intel CoreTM i5 2.4GHz or greater
- Memory
- 4GB or greater
- Hard disk free space
- 800MB minimum
- Display resolution
- 1280 x 1024 DPI or greater
- USB port
- USB port: USB 1.1 or USB 2.0 (software license key)

