
関連製品・機能
豊富なロボットラインナップ
5kg可搬のコンパクトタイプから700kgの大型ロボットまでラインナップ
ロボット












































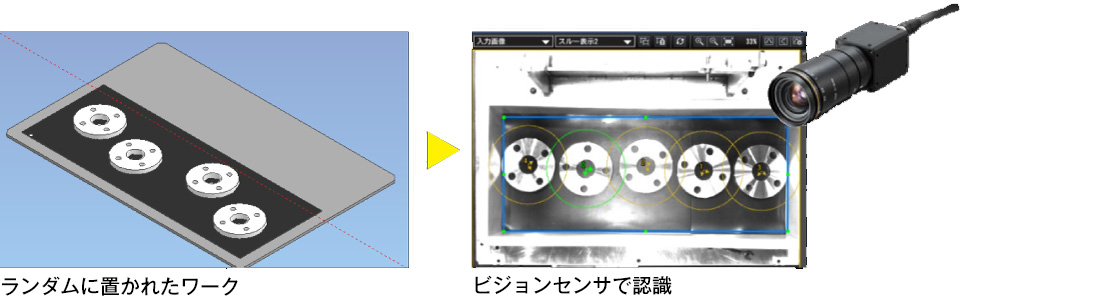
2Dビジョンセンサ機能
2Dビジョンセンサと簡単接続。ランダムに置いたワークを認識し、ロボットが自動的
にピッキングするなど、適用アプリケーションが拡大。

オフラインティーチングシステムFD-ST
ワークの着脱をシミュレーション可能。実機での検証時間を大幅低減。

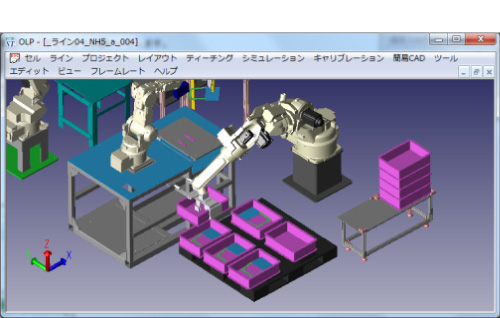
パレタイジング
ワークの個数・積み方・配置を指定するだけで、複雑なパレタイジングの教示を簡単に。

Login
アダプティブモーション
ワークの位置にバラツキがあっても、ワークとハンドの干渉力を吸収するようにサーボ制御するため、機械的なフローティング機構が不要となります。
Login
動画


7軸ロボットによるパフォーマンス映像 7軸ロボットの柔軟性により高密度設置が可能で、省スペース設備を実現

7軸ロボットによる3セル間の工程間搬送 7軸ロボットの柔軟性を活かし、ロボット1台で3セル間のワーク搬送を実現し、設備コストの低減に貢献

7軸ロボットによる複数台協調溶接システム
ロボットの協調動作により専用治具が不要でコスト削減、段取り替え時間の大幅短縮
7軸ロボットの柔軟性により最適な溶接姿勢と高密度設置を両立し、省スペース設備を実現

ボルトパレタイジングシステム 小形ハンドリングロボットによるボルト寸法の計測とパレタイジング

ネジ締めロボットシステム ロボットによるボルトピッキングからネジロック材の塗布、ねじ締めまでの自動化システム

トランスケース自動溶接システム 大形ハンドリングロボットとアーク溶接ロボットによる全自動溶接システム

トランスケース搬送ロボット 大形ハンドリングロボットによるショットブラスト装置への搬入・搬出
ロボット
-
低可搬(3~8kg)
 マニピュレータ仕様
マニピュレータ仕様
マニピュレータ仕様低可搬(3~8kg)
- 1
- 2
-
型式 NB6 NV8 NB6L NV8L 軸数 6 6 6 6 最大許容可搬質量 6kg 8kg 6kg 8kg 位置繰返し精度 ±0.08mm ±0.08mm (注1) 士0.08mm (注1) 士0.08mm (注1) 駆動容量 3132W 3016W 4832W 5000W 動
作
範
囲腕 J1(旋回) ±170°(±50°) ±170° (±50°) (注2) 士170°(士50°) (注2) 土170°(壁:士50°)(注2) J2(下腕) –155°〜+90° –155°〜+90° -155°〜+100°(注3) -155°〜+100° J3(上腕) –170°〜+245° –170°〜+190° -170°〜+190° -170°〜+260° 手
首J4(回転) ±155° ±180° ±土155°(土170°) (注4) 士180° J5(振り) –45°〜+225° –50°〜+230° -45°〜+225°(注5) -50°〜+230° J6(ひねり) ±205° ±360° 士205°(士360°) (注4、5) 士360° -
型式 NH5 NS3 軸数 ◀ 6 最大許容可搬質量 5kg 3kg 位置繰返し精度 ±0.05mm (注1) ±0.08mm (注1) 駆動容量 1440W 390W 動
作
範
囲腕 J1(旋回) ±170° ±135° (±45°) (注2) J2(下腕) –125°〜+90° –160°〜+65° J3(上腕) –140°〜+245° –130°〜+125° 手
首J4(回転) ±190° ±180° J5(振り) –30°〜+210° –40°〜+220° J6(ひねり) ±360° ±360°
-
中可搬(15~25kg)
 マニピュレータ仕様
マニピュレータ仕様
マニピュレータ仕様中可搬(15~25kg)
-

型式 NV25 NV25L NB26 軸数 6 6 6 最大許容可搬質量 25kg 25kg 26kg 位置繰返し精度 士0.07mm (注1) 士0.07mm (注1) 士0.04mm (注1) 駆動容量 5600W 11,500W 5800W 動
作
範
囲腕 J1(旋回) 土170°(壁:土50°) (注2) 土180° 土170°(壁:土50°) (注2) J2(下腕) -155°〜+100° -155°〜+90° -155°〜+100° J3(上腕) -170°〜+260° -180°〜+250° -170°〜+250° 手
首J4(回転) 土180° 土180° 土170°(壁:土1555°) (注2) J5(振り) -50°〜+230° -50°〜+230° -45°〜+225° J6(ひねり) 土360° 土360° (注3) 土360° (壁:土205°) (注2)
-
-
高可搬(50~210kg)
 マニピュレータ仕様
マニピュレータ仕様
マニピュレータ仕様高可搬(50~210kg)
-
型式 NV50 NV80 NV100 NV130 NB100 NV166 NV210 軸数 6 ◀ ◀ ◀ 6 ◀ ◀ 最大許容可搬質量 50kg (注) 80kg 100kg 130kg 100kg 166kg 210kg 位置繰返し精度 ±0.07mm ±0.08mm (注1) ◀ ◀ ±0.08mm (注1) ±0.1mm (注1) ±0.15mm (注1) 駆動容量 14750W 15kW ◀ ◀ 16kW 18kW ◀ 動
作
範
囲腕 J1(旋回) ±165° ±180° ◀ ◀ ±180° ◀ ◀ J2(下腕) +80°~-135° –155°〜+90° ◀ ◀ –155°〜+90° –80°〜+60° ◀ J3(上腕) +260°~-146° –185°〜+220° ◀ ◀ –185°〜+170° –146.5°〜+150° ◀ 手
首J4(回転) ±360° ±360° ◀ ◀ ±210° ◀ ◀ J5(振り) ±125° –35°〜+215° ◀ ◀ –35°〜+215°° ±135° ±130° J6(ひねり) ±450° ±360° ◀ ◀ ±210° ◀ ◀
-
-
7軸ロボット
マニピュレータ仕様
マニピュレータ仕様7軸ロボット
-
構造 垂直多関節型 垂直多関節型 垂直多関節型 垂直多関節型 垂直多関節型 軸数 7 7 7 7 7 最大許容可搬質量 6kg 6kg 8kg 8kg 20kg 位置繰返し精度 ±0.05mm (注1) ±0.06mm (注1) ±0.05mm (注1) ±0.06mm (注1) ±0.06mm (注1) 駆動方法 ACサーボモータ ACサーボモータ ACサーボモータ ACサーボモータ ACサーボモータ 駆動容量 4132W 5832W 4016W 6000W 6600W 位置フィードバック 絶対値エンコーダ 絶対値エンコーダ 絶対値エンコーダ 絶対値エンコーダ 絶対値エンコーダ 動
作
範
囲腕 J1(旋回1) ±170° ±170° ±170° ±170° ±170° J2(前後) –145°〜+70° –145°〜+75° –145°〜+70° –145°〜+75° –145°〜+75° J7(旋回2) ±90° ±90° ±90° ±90° ±90° J3(上下) –170°〜+142.6° –170°〜+154° –170°〜+149° –170°〜+160° –170°〜+160° 手
首J4(回転) ±155° ±155° ±180° ±180° ±180° J5(振り) –45°〜+225° (注2) –45°〜+225° (注2) –50°〜+230° (注2) –50°〜+230° (注2) –50°〜+230° (注2) J6(ひねり) ±205° (注2) ±205° (注2) ±360° (注2) ±360° (注2) ±360° (注2)
-



5kg可搬のコンパクトタイプから210kgの大形ロボットまでラインナップ。
搬送、組立、加工作業など、あらゆるシーンでお客様の自動化に貢献します。
関連製品・機能
ロボット

